Mediating Shared Basis in Situated Human Robot Dialogue
Motivations and Objectives
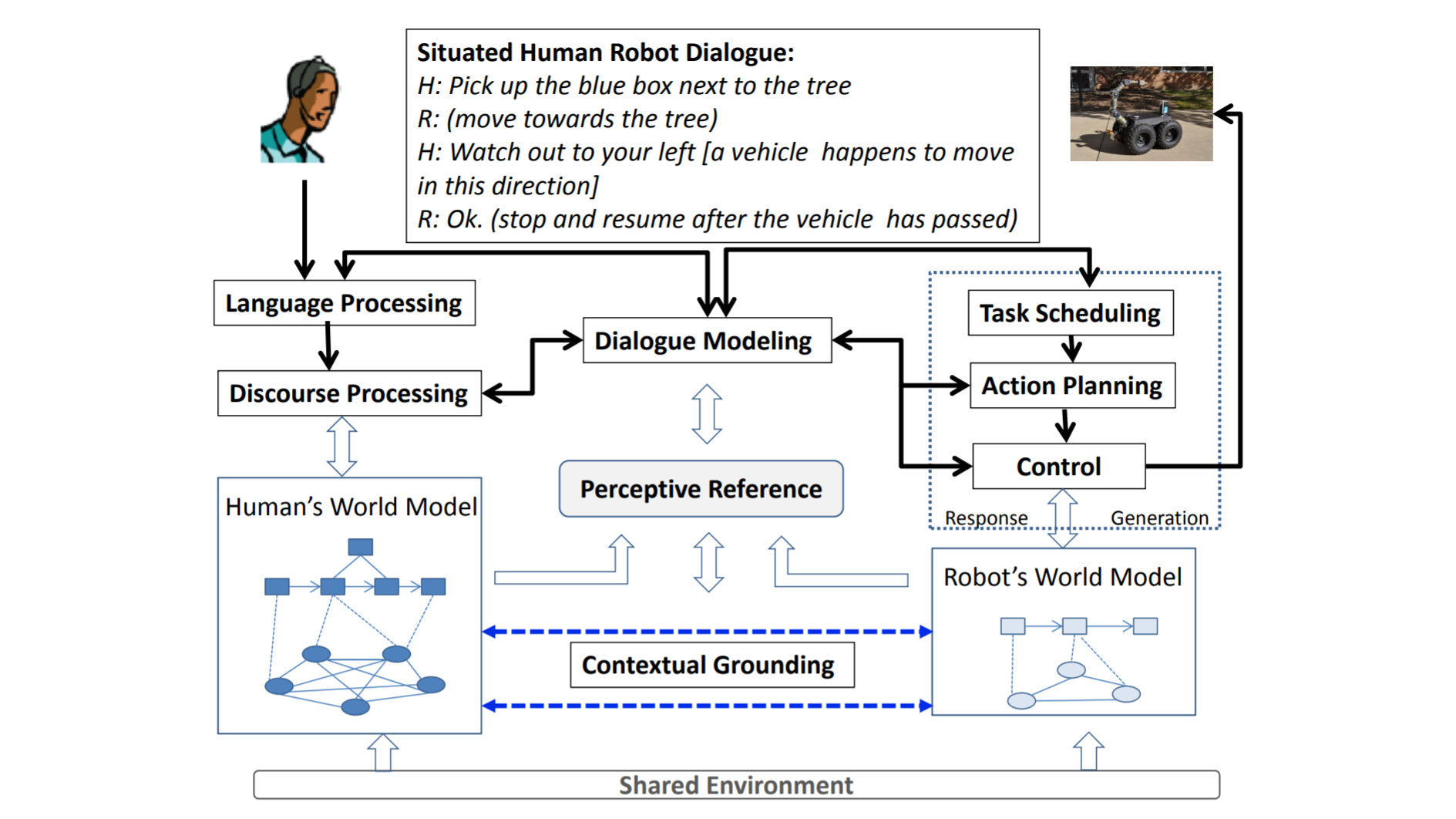
Humans and robots have different representations of the shared environment. They also have different capabilities to attend and respond to the unexpected events in the environment. To address this issue, this project integrates high level language and dialogue processing with low level sensing and control systems and supports collaborative dialogue to mediate a shared basis between humans and robots.
Related Papers
- Embodied Collaborative Referring Expression Generation in Situated Human-Robot Dialogue. R. Fang, M. Doering, and J. Y. Chai. Proceedings of the 10th ACM/IEEE Conference on Human-Robot Interaction (HRI), Portland, Oregon, March 2-5, 2015.
- Learning to Mediate Perceptual Differences in Situated Human-Robot Dialogue. C. Liu and J. Y. Chai. Proceedings of the 29th AAAI Conference on Artificial Intelligence (AAAI), Austin, Texas, January 25-30, 2015.
- Collaborative Models for Referring Expression Generation towards Situated Dialogue. R. Fang, M. Doering, and J. Y. Chai. Proceedings of the 28th AAAI Conference on Artificial Intelligence (AAAI), Quebec, Canada, August, 2014.
- Probabilistic Labeling for Efficient Referential Grounding based on Collaborative Discourse. C. Liu, L. She, R. Fang, and J. Y. Chai. Proceedings of 52nd Annual Meeting of the Association for Computational Linguistics (ACL), Short Paper, Baltimore, MD, June 22-26, 2014.
- Teaching Robots New Actions through Natural Language Instructions. L. She, Y. Cheng, J. Y. Chai, Y. Jia, S. Yang, and N. Xi. The 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, August 25-29,2014.
- Back to the Blocks World: Learning New Actions through Situated Human-Robot Dialogue. L. She, S. Yang, Y. Cheng, Y. Jia, J. Y. Chai, and N. Xi. Proceedings of 15th SIGDIAL Meeting on Discourse and Dialogue, Philadelphia, PA, June 18-20, 2014.
- Perceptive Feedback for Natural Language Control of Robotic Operations. Y. Jia, N. Xi, J. Y. Chai, Y. Cheng, R. Fang, and L. She. 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong, China, May 31 - June 7, 2014.
- Collaborative Effort towards Common Ground in Situated Human-Robot Dialogue. J. Y. Chai, L. She, R. Fang, S. Ottarson, C. Littley, C. Liu, and K. Hanson. The 9th ACM/IEEE Conference on Human-Robot Interaction (HRI), Bielefeld, Germany, March 3-6, 2014.
- Towards Situated Dialogue: Revisiting Referring Expression Generation. R. Fang, C. Liu, L. She, and J. Y. Chai. Conference on Empirical Methods in Natural Language Processing (EMNLP), Seattle, Washington, October, 2013.
- Modeling Collaborative Referring for Situated Referential Grounding. C. Liu, R. Fang, L. She, and J. Y. Chai. The 14th Annual SIGDIAL Meeting on Discourse and Dialogue (SIGDIAL), pp. 78-86, Metz, France, August, 2013.